全領域を手放しで
刈取り

- ※ほ場の形状や刈取方法によっては、手動作業が複数回必要になる場合やオートコンバインモードがご利用いただけない場合があります。
- ※衛星電波の受信条件(天候や大気の電離圏の状態、周囲の地形・建物、衛星の数や配置、時間帯等)により自動操舵の精度が低下したり、自動操舵が使用できない場合があります。
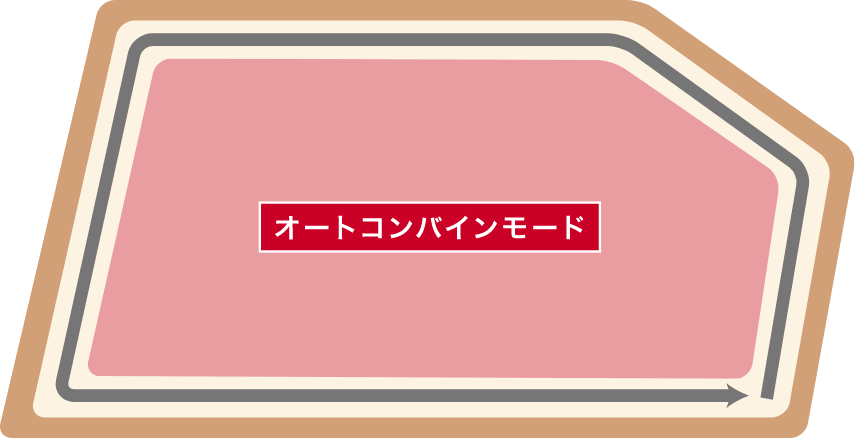
オートコンバインモードなら
乗っているだけで高精度・高能率に刈取り。
直進・刈取昇降・隅刈り・旋回・排出への移動・中割りの位置決めまで自動で作業が行えます。
2周目からの隅刈りも自動!【オートコンバインモード】
適応作物:稲・麦・そば
最初の1周分は手動走行で作業領域を登録

オートコンバインモード
2周目からオートコンバインモードが使用可能
- ※ほ場の形状や刈取方法によっては、手動作業が複数回必要になる場合やオートコンバインモードがご利用いただけない場合があります。
最大30角形までの外形登録が可能
多角形ほ場もほとんどを自動で直進でき大幅に省力化できます。
※最大30の角まで可能。ただし角と角の間は11m以上
複雑なハンドル操作が必要な隅刈りも自動でできる
稈こぼれ防止や排わら回避も自動。作業精度が向上します。

リール下降連動
刈り終わりになると、稈こぼれを防ぐためリールが自動で下降。作業中のオートリフト操作が不要で高速作業ができます。

排わら避け機能
前工程の排わらを回避するために、UFOの角度を自動制御。
刈取部に排わらを取り込まないので、安心して隅刈り作業を行えます。
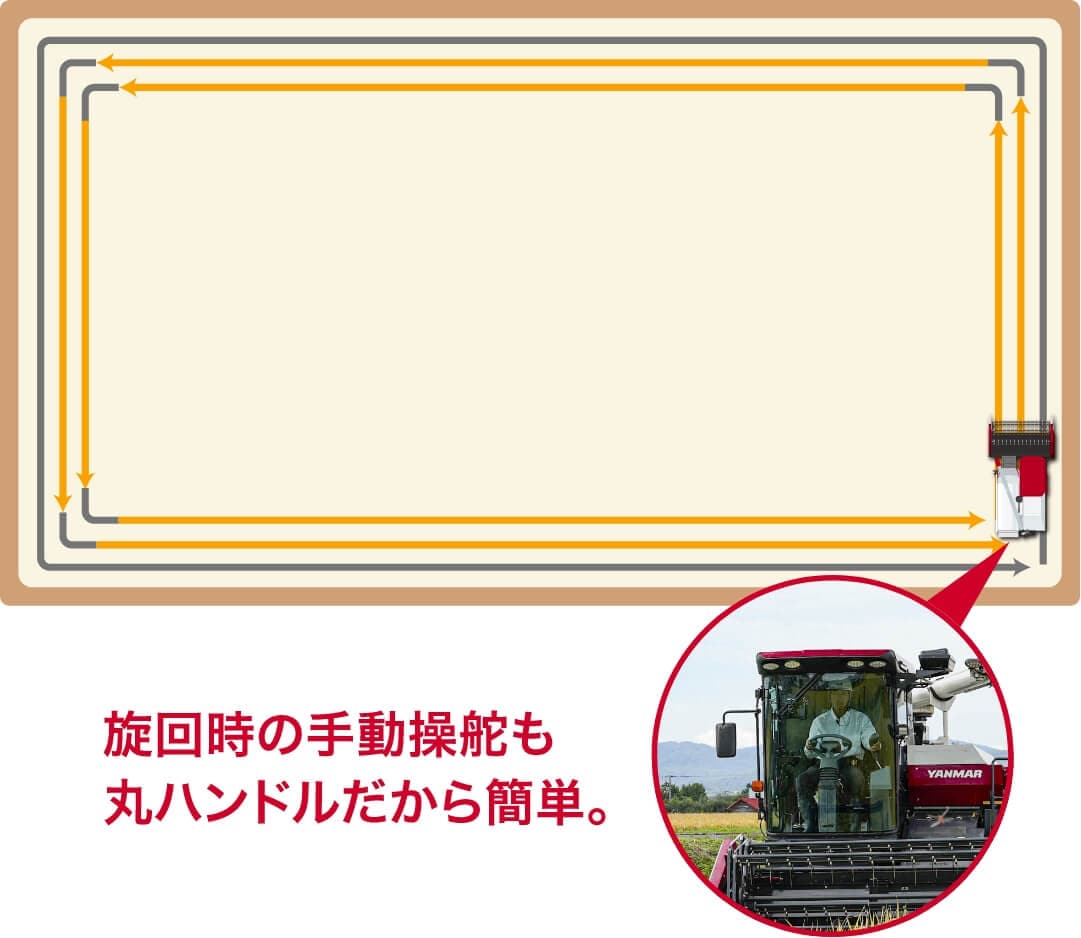
もっとも効率の良い経路を自動でスムーズに旋回します
条合わせや刈取部の昇降も素早く行い、旋回から刈始めまでの速度が落ちません。

刈終り
ヘッダーが自動で上昇

旋回後
自動で条合わせ

刈始め
刈高さを自動でセット
旋回をより早く、ムダなく
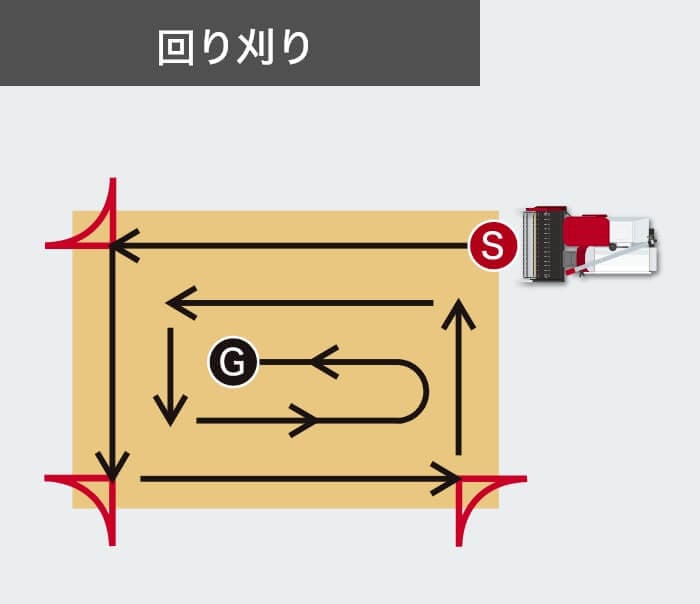
できるだけほ場を荒らすことなく、作業をするほ場の条件に合わせて刈り方が選択できます。
経路パターン 3パターンの刈方から選択できます。
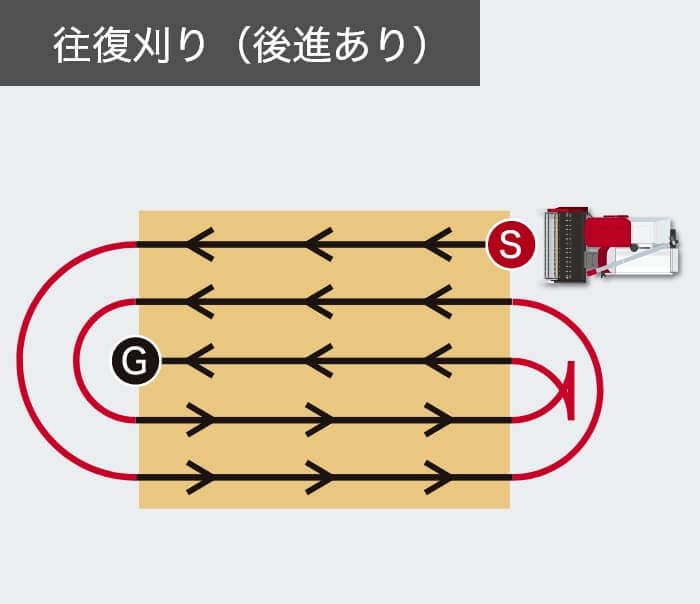
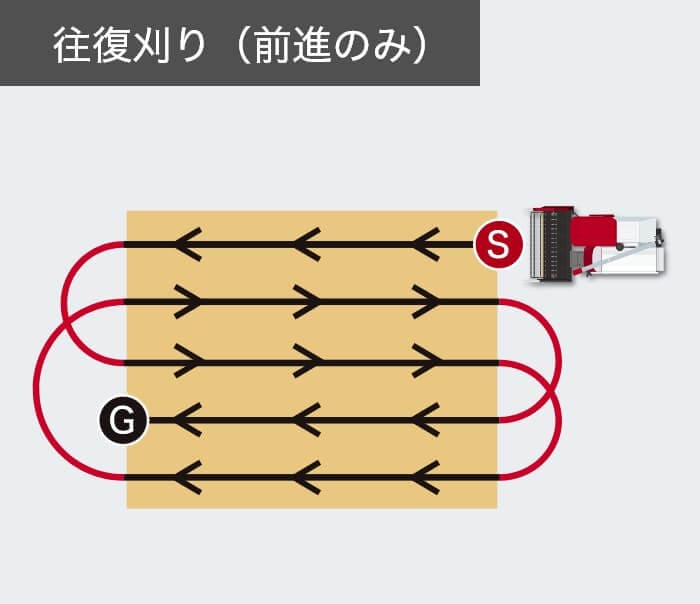
※往復刈りを選択しても往復刈りの旋回スペースができるまでは、回り刈りをおこないます。
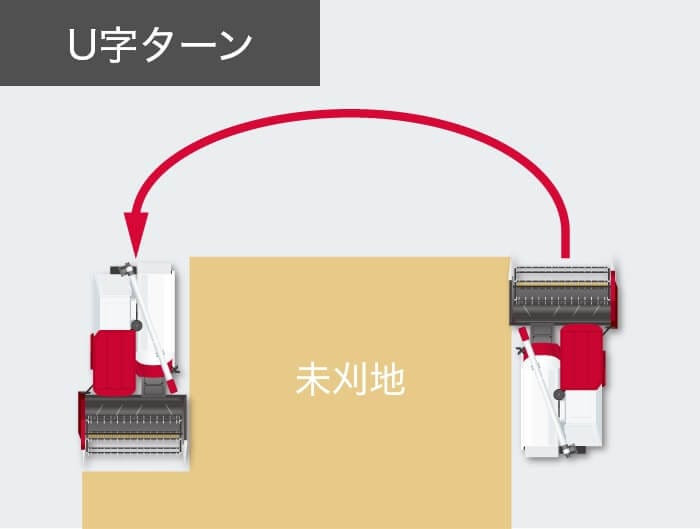
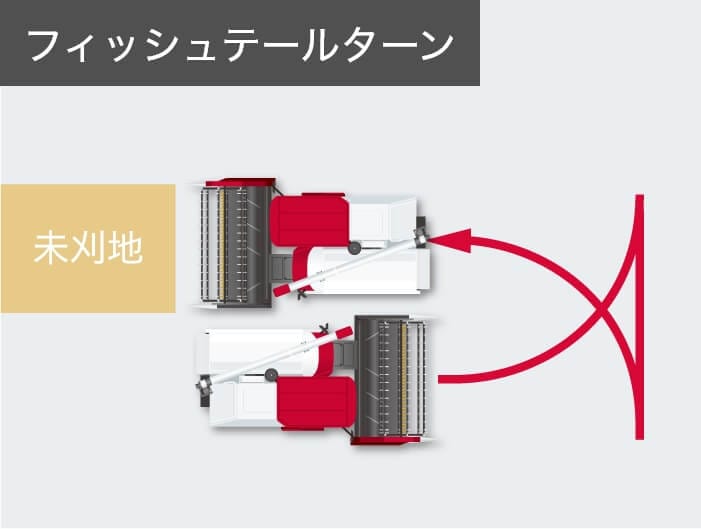
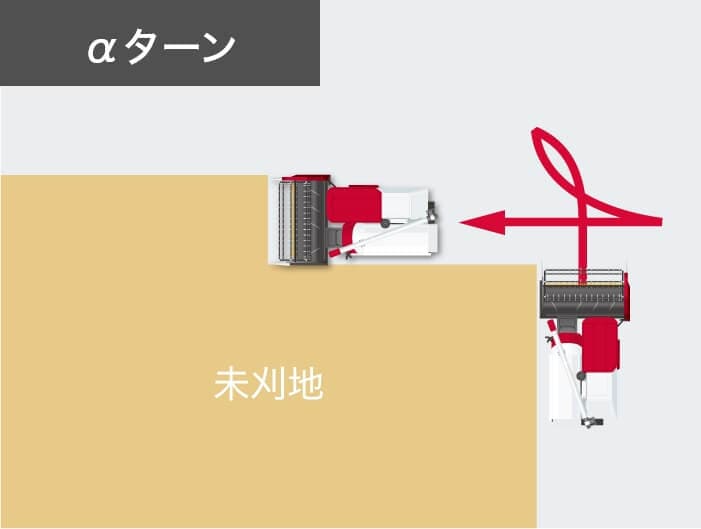
旋回パターン 3パターンから最も効率の良いターンを自動で選択します。
自動で排出ポイントへ移動
グレンタンクの満タン時期を予測、満タンになるまで残り1周以下になった時点で最適な経路を割り出しお知らせ、自動で排出位置に移動します。排出作業は手動となります。
- ※収穫する作物によってはできない場合があります。
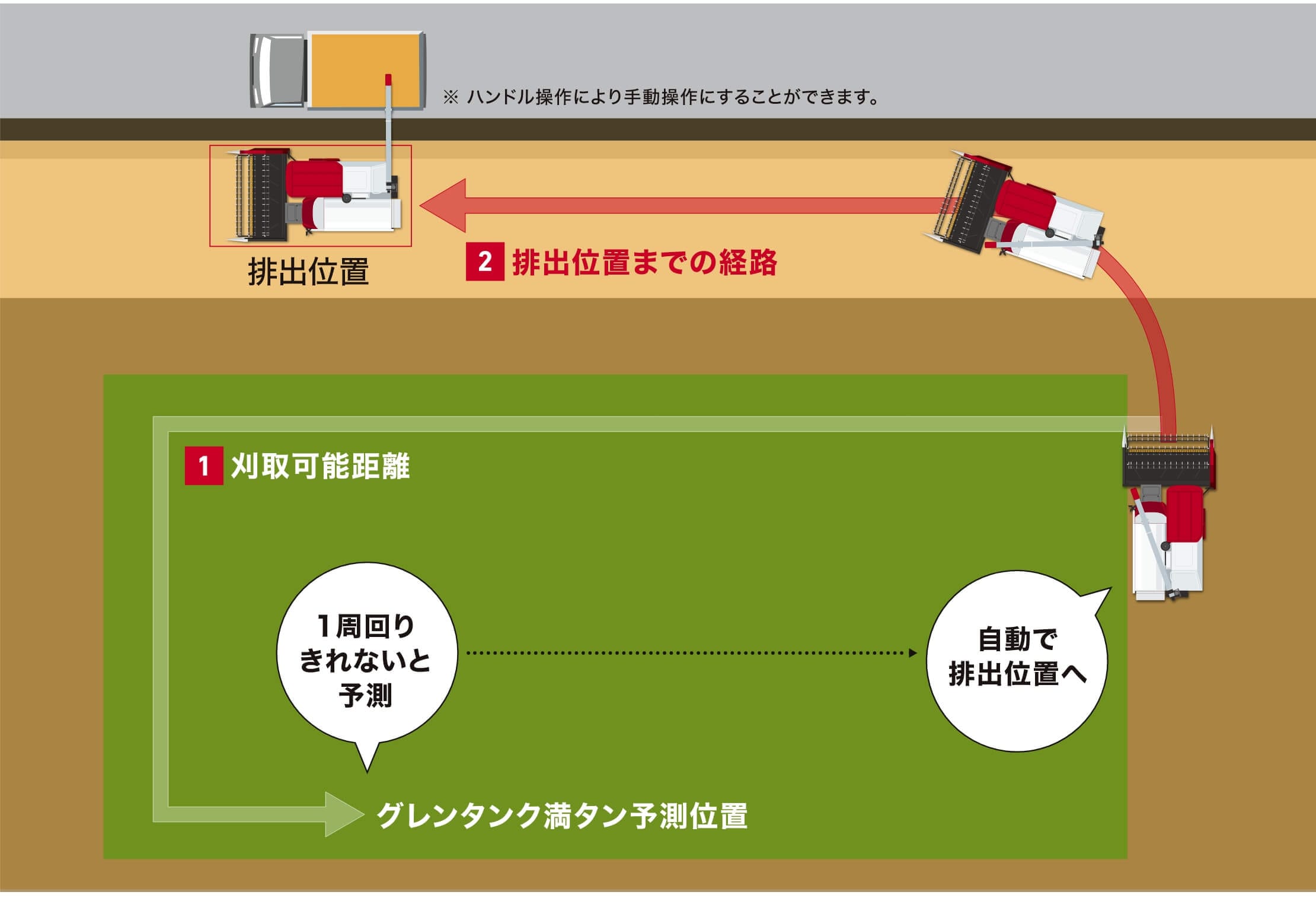

排出経路もタブレットで確認できます。

グレンタンクが満タンになるまでの走行可能な距離をタブレットに表示。

満タンになるまで残り1周以下になった時点で、排出位置までの経路を表示。
早く排出したい際は、算出された位置より前に排出位置に向うことも可能です。

設定した回数だけ自動で中割り
自動中割り
刈り取り時間が最も短くなるように自動で中割り位置を設定。中割り回数を手動で設定することもできます。
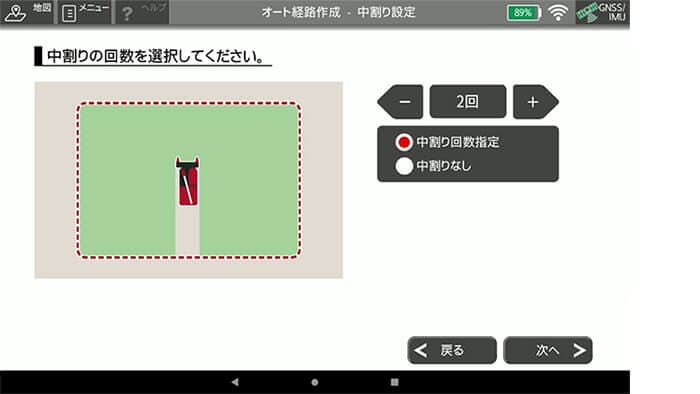
オート経路作成・中割り設定画面

オート仕様にも対応
自動刈高さ制御
ソリが地面との高さを感知し自動で刈取部を地面に追従させます。

ほ場条件によって活用できる2つのモード
オートコンバインモードで対応できない場所があるほ場では、「直進モード」と「枕地直進モード」を活用できます。
ほ場の外形登録が不要 【直進モード】
対応作物:稲・麦・そば・大豆・小豆・子実用とうもろこし
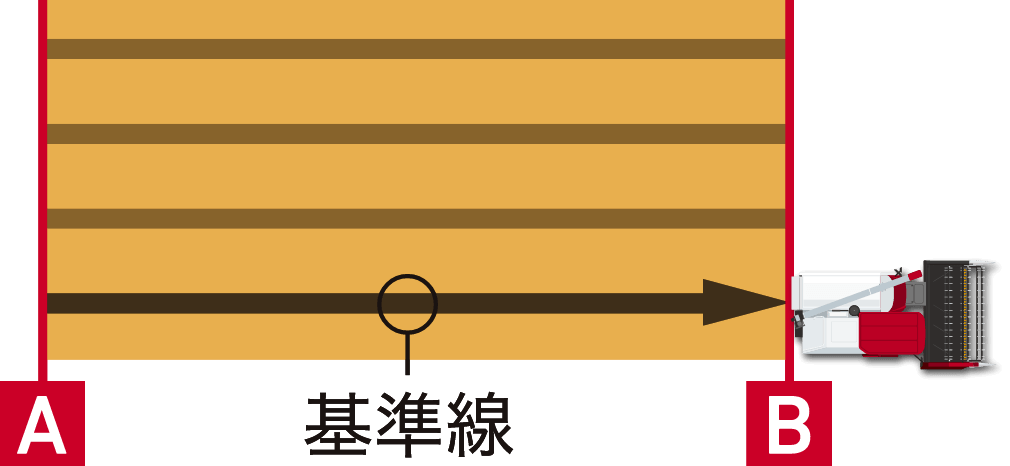
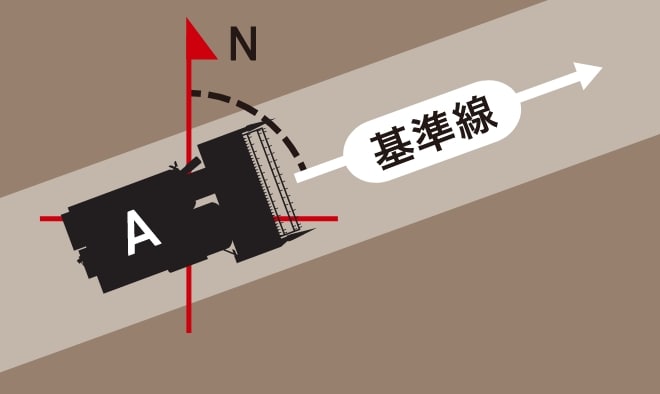
設定した基準線に平行して自動直進
A点(開始地点)とB点(終了地点)を設定し基準線を登録するだけ。変形田でオート経路が作成できない場合でも直進の自動操舵が可能です。

大豆・子実コーンの刈取りに便利な機能!
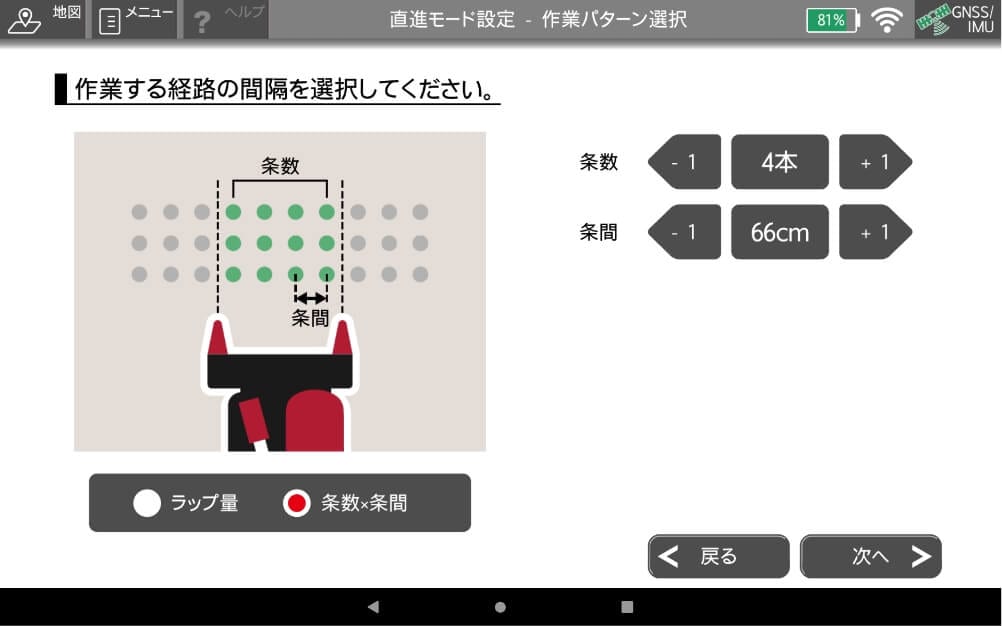
各条数の作業幅やラップ幅に応じて、経路の自動作成が可能!
A点(開始地点)とB点(終了地点)を設定し基準線を登録するだけ。変形田でオート経路が作成できない場合でも直進の自動操舵が可能です。
ラップ量設定
20〜30cmの範囲で5cm単位で設定できます。
条数×条間設定
- 条数:3〜5本(1本単位で設定できます)
- 条間:60〜75cm(1cm単位で設定できます)
こんなほ場の時に・・・
障害物などのある凹型ほ場の場合
領域を分けることによって大部分の作業を自動化できます。

直進中のハンドル操作が不要【枕地直進モード】
適応作物:稲・麦・そば
ほ場条件によっては枕地直進モードでも作業可能
ほ場外形の辺に対してそれぞれ平行に自動操舵を行います。
旋回のみ手動操舵が必要です。
こんなほ場の時に・・・
短辺が短く横に長いほ場の場合
往復刈りでの旋回時も、直進は自動、旋回時の手動操舵も
FDS + 丸ハンドルでスムーズ!
各種設定・作業状況の確認が簡単。
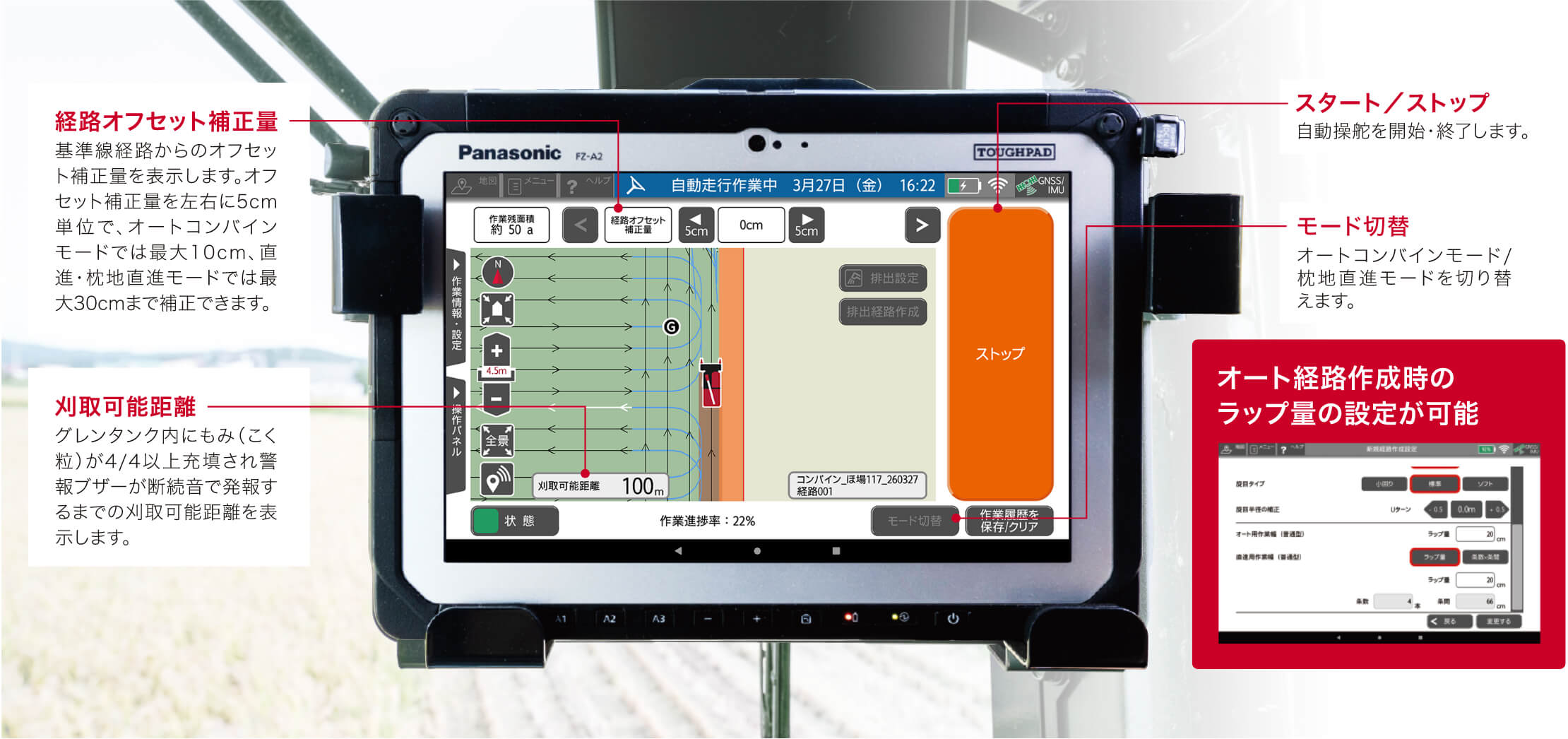
自動モードの設定もタブレット操作で簡単
- ほ場外形登録を元に作業領域の設定
- 作業経路の作成
- 「スタート」をタップし、主変速レバーを前進側に操作して作業開始。
- 作業方向・経路パターン・中割り回数の設定
- 作業経路の作成
- 「スタート」をタップし、主変速レバーを前進側に操作して作業開始。
- 開始地点「A」を設定
- 終了地点「B」を設定
- 作業経路の作成
作業経路は方位角(車両の向き・数値入力)でも入力可能
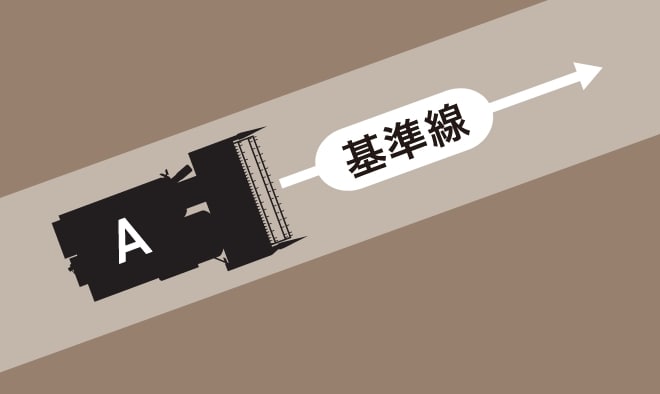
A点+車両方位角
コンバインの位置(A点)とコンバインの向きから基準線を作る
A点+設定方位角
コンバインの位置(A点)と基準角度の設定から基準線を作る
操作性のよいスイッチ配置だから楽な姿勢で作業ができる

AUTO スイッチ
オールマイティーシフトレバーでも自動操舵の「ON」が行えます。
- ※自動操舵の「OFF」はできません。

リール昇降スイッチ
走行中にリール昇降を操作します。通常作業でも操作することができます。
オフセットスイッチ
作業中、経路からズレている場合は、軌道修正が可能。
安心・安全性能も追求

アームレスト付きセミサスペンションシート
前後・上下・背もたれの調節が可能。またシート下のスイッチで人が座っているかを感知。座っていないときは自動操舵が作動せず、誤作動を防ぎます。
- ※標準仕様にはシートスイッチセンサーは装備されていません。

ハンドレスト
ハンドルから手を離しているときでも、安定した姿勢で安心して作業ができます。
- ※標準仕様には装備されていません。

デュアルモニター
機体後方と排出オーガ先端の映像が運転席で同時に確認でき、効率よく安全に作業が行えます。
- ※1画面表示も可能です。
位置情報の取得方式
オートコンバインは高精度な位置情報を取得できるRTK-GNSS方式で位置情報を取得しています。
- ※衛星電波の受信条件(天候や大気の電離圏の状態、周囲の地形・建物、衛星の数や配置、時間帯等)により直進アシスト性能の精度が低下したり、直進アシストの機能が使用できない場合があります。
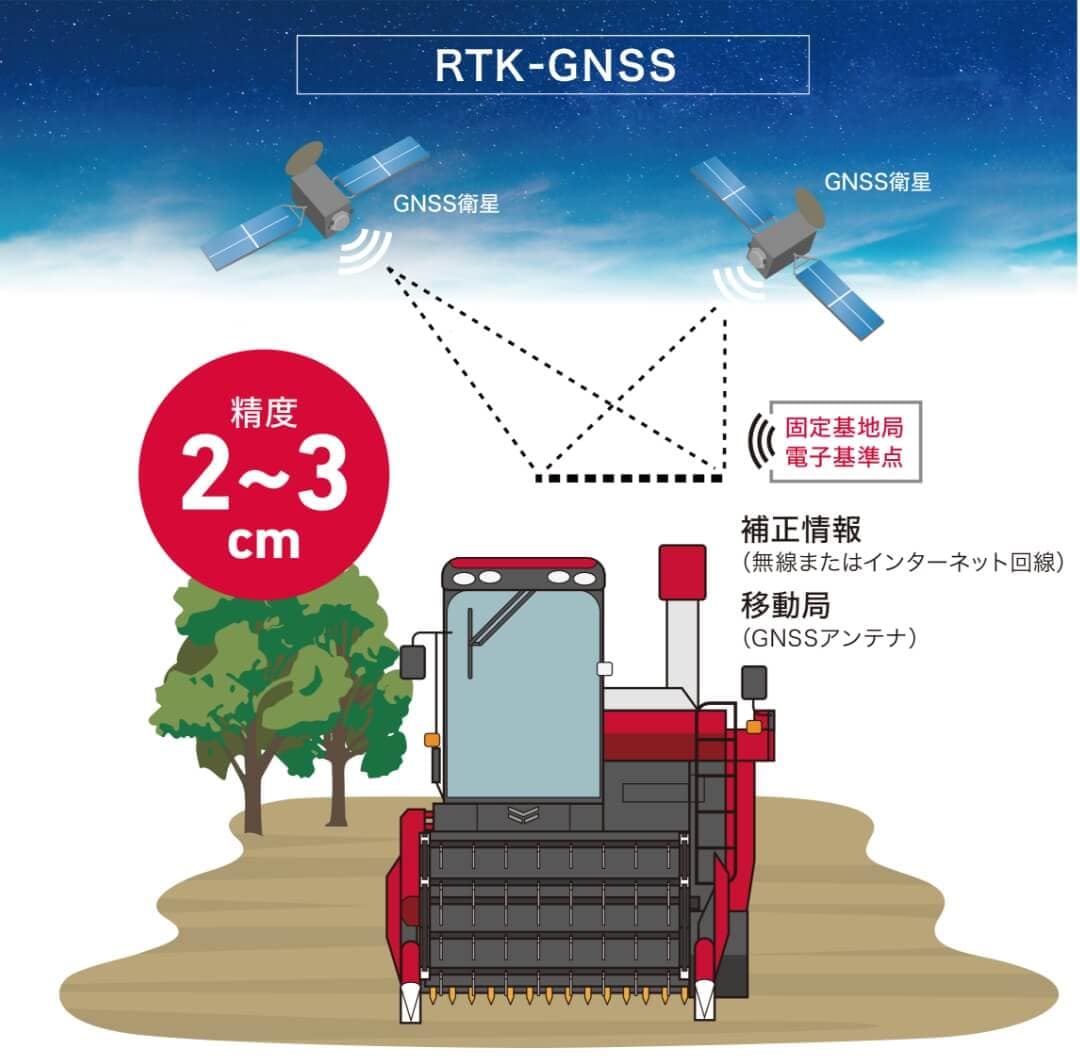
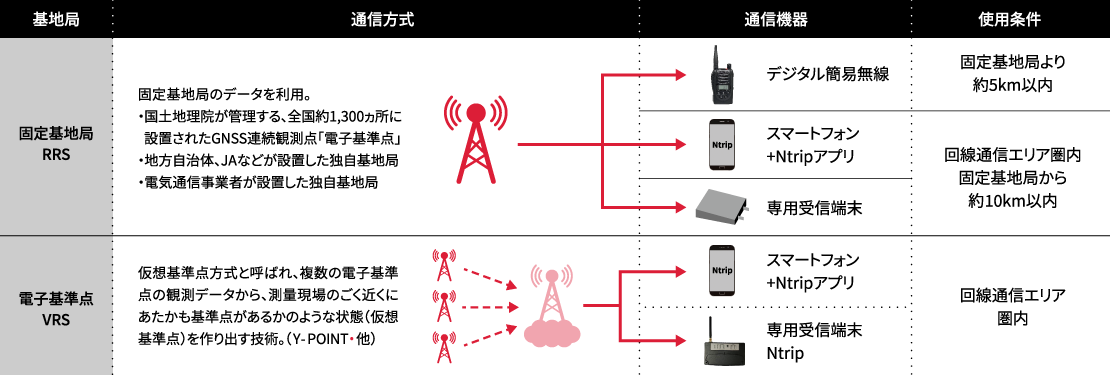
RTK-GNSS方式での補正情報の取得
ヤンマーが提供する高品質のRTK位置補正情報サービスで、作業精度が大幅に向上。より安定・確実な作業を可能にします。
- ※RTK(Real Time Kinematic)は、リアルタイムキネマティック測量の略で、既知点からの補正観測情報をインターネット回線や無線を利用して、コンバイン(移動局)に送信し、コンバインの位置をリアルタイムで測定する方法を言います。
- ※GNSS(Global Navigation Satellite System(s))は、GPSやGLONASSなどの測位システムの総称で、日本語では「全地球航法衛星システム」や「全球測位衛星システム」と呼ばれています。
- ※電子基準点とは、国土地理院が管理する全国約1,300カ所に設置されたGNSS連続観測点。
- ※ほ場での測位誤差は、RTK-GNSS2点間の相対位置 誤差/数cm
- ※GNSS受信機は、対応型式である必要があります。補正情報:RRS方式/VRS方式補正情報のデータフォーマット:RTCM3.0/RTCM3.1/RTCM3.2/CMR/CMR+
- ※Ntrip(Networked Transport of RTCM via Internet Protocol)は、GNSSの観測データや補正データの送受信をインターネット経由で行うための通信方式です。※補正情報サービスには、別途、通信機器代・通信費・利用料がかかります。
- ※オプションを取り付ける場合、別途取付工賃が発生する場合があります。