作業幅・ラップ幅等の設定が5パターン登録可能!
登録後は、パターンを呼び出すことで、すぐに直進アシストをスタートできます。
登録可能な設定内容
作業幅、ラップ幅、経路オフセット量、経路作成モード、基準線作成、ステアリング感度、スリップ補正、経路作成基準位置、作業精度、作業終点お知らせ、下げオート連動





エンジンスタートから手動で20m前進するだけで準備完了!!




未耕地を防ぎ重複を最小限にできます。

ラップ幅を最小限にして重複を少なくし、効率のよい作業を実現!

一定の間隔をあけて作業でき、散布の重複や未散布などムダ・ムラを防止します。

作業跡がわかりにくい作業でも、作業幅を設定することで、未耕地を防ぎ重複を最小限に

1本飛ばし作業
作業幅を設定することで、間隔が広い1本飛ばし作業も迷わず等間隔で作業ができます。

モニターに経路を表示
旋回して次の工程に入るときは、表示通りに入ればOK!設定したラップ幅通りに作業ができます。

作業したところは塗りつぶし表示
どこまで作業したか一目瞭然。
拡大・縮小することもできます。
登録後は、パターンを呼び出すことで、すぐに直進アシストをスタートできます。
作業幅、ラップ幅、経路オフセット量、経路作成モード、基準線作成、ステアリング感度、スリップ補正、経路作成基準位置、作業精度、作業終点お知らせ、下げオート連動

マルチのかけ始めや、作業中にマルチシートが無くなって停止した際でも、スイッチを押すだけで直進アシストを再開!


難しいバックの直進が手放しでOK!
速度を落とさずまっすぐバックでき、ほ場も荒らしにくい。
リバーサレバーをRに入れ、スイッチを押すだけ!
うね立てマルチのワンウェイ作業の際、バックも自動で直進でき作業能率アップ!


目標経路に素早く追従させたい場合や、前輪が細かく動く場合に調整。直進アシスト中のステアリングの切れ具合を5段階に設定可能。
湿田・傾斜地などで使用。ステアリングを切ってもスリップにより、前輪が横滑りする場合に、直進するように補正。通常「OFF」で、「弱」「中」「強」が選択可能。

直進アシストはD-GNSS方式で位置情報を取得しています。
オプションとして、さらに高精度な位置情報を取得できるRTK- GNSS方式もご用意しています。

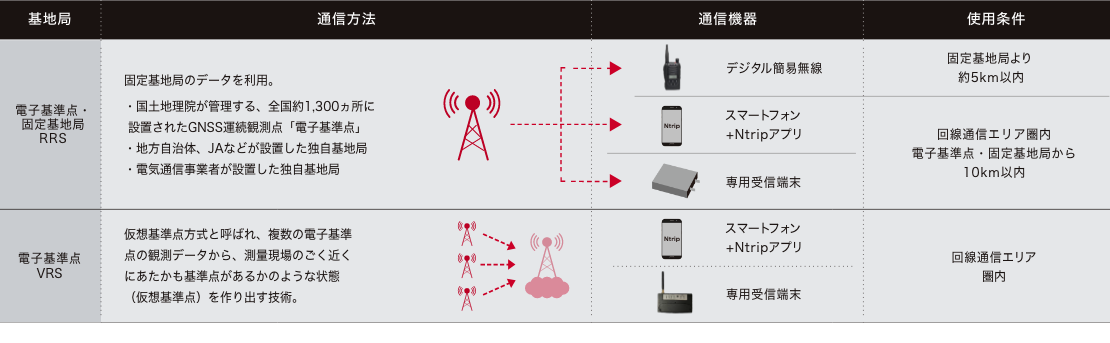
※RTK(Real Time Kinematic)は、リアルタイムキネマティック測量の略で、既知点からの補正観測情報をインターネット回線や無線を利用して、トラクター(移動局)に送信し、トラクターの位置をリアルタイムで測定する方法を言います。※GNSS(Global Navigation Satellite System(s))は、GPSやGLONASSなどの測位システムの総称で、日本語では「全地球航法衛星システム」や「全球測位衛星システム」と呼ばれています。※電子基準点とは、国土地理院が管理する全国約1,300カ所に設置されたGNSS連続観測点。※ほ場での測位誤差は、RTK-GNSS2点間の相対位置 誤差/数cm ※GNSS受信機は、対応型式である必要があります。補正情報:RRS方式/VRS方式補正情報のデータフォーマット:RTCM3.0/RTCM3.1/RTCM3.2/CMR/CMR+ ※Ntrip(Networked Transport of RTCM via Internet Protocol)は、GNSSの観測データや補正データの送受信をインターネット経由で行うための通信方式です。※補正情報サービスには、別途、通信機器代・通信費・利用料がかかります。
※オプションを取り付ける場合、別途取付工賃が発生する場合があります。
オプションで、誤差±2~3cmに測位できるRTK-GNSS方式も利用可能になります。 特にまっすぐ、 高精度な作業が求められる、 あぜ塗りやうね立てに適しています。
■ 高精度±2~3cm
■ 0.2km/hからの低速作業が可能
■ 時間が経過しても位置のズレが少ない
基準線のつくり方は3パターン

A点とB点を指定して基準線をつくります。

トラクターの向きから基準線をつくります。

基準角度の設定から基準線をつくります。
基準線を登録できる
基準線を登録しておけば、時期や作業が違っても同じ位置で作業ができます。(最大28件登録可能)
例えばうね立て・播種で使用した基準線を登録しておけば、中耕作業時に同じ基準線で、自動で直進作業が行えます。


SMARTPILOT®(スマートパイロット)は、位置情報やロボット技術などのICTを活用して農作業の省力化・効率化、高精度化を実現する自動運転技術を搭載した農業機械シリーズの総称です。

スマートアシストは、GPSアンテナおよび通信端末を搭載した農業機械から発信される稼働状況やコンディションの情報をもとに、お客様の作業改善や経営改善を実現するサービスです。

必要な対応を行うことで、トラクターに作業機を装着したまま道路走行ができるようになりました。必要な対応は、「早わかりシステム」でカンタンにご確認いただけます。